
Posts by Collection
portfolio
Vision-Controlled Bionic Arm
Developed a real-time gesture-controlled bionic arm using Python and MediaPipe for hand gesture recognition and Arduino for precise servo control, effectively translating human hand movements into synchronized robotic responses.
Visual Odometery for Monocular Camera
Developed and implemented a Visual Odometry system for a monocular camera using Python and OpenCV, achieving precise pose estimation and trajectory mapping in real-time, thereby enhancing the understanding of camera motion within 2D and 3D environments.
Depth Completion for Self-Driving Cars
Developing a novel approach for depth completion using a combination of RGB and depth data to improve accuracy and completeness.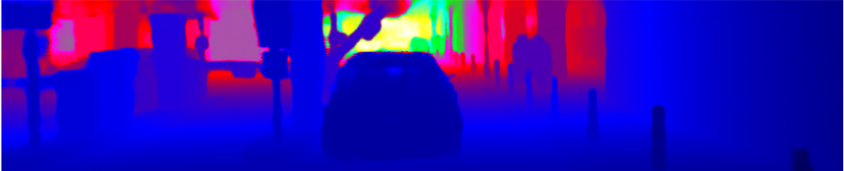
Image Segmentation
Developed semantic image segmentation using U-net Architecture 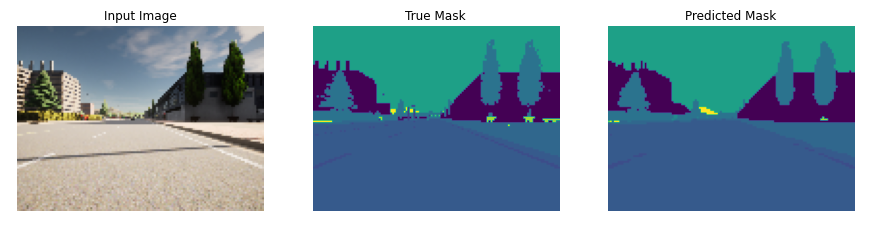
Image Classification of Stroke Blood Clot Origin
Leveraged deep learning techniques, including transfer learning, to develop an algorithm that accurately classifies blood clots based on their origin, with an accuracy of 72.4% and 73.75% for CE and LAA clots, respectively. 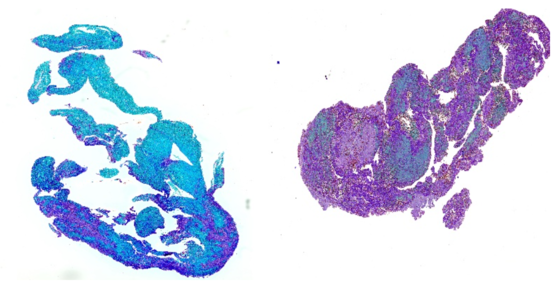
Bipedal Walking
Crafted a 12DoF Dynamic Walking Robot in Matlab-Simulink that overcomes the challenges of traversing on flat terrain by generating precise footstep planning, zero moment points, and applying inverse kinematics for seamless movement. 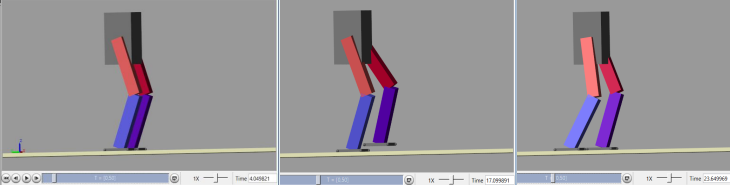
SPEAR: Soft Robotic EMG Assisted Rehabilitation
Developed a bio-inspired soft robotic rehabilitation solution for foot paralysis in stroke patients, utilizing EMG signals for muscle activation and a custom-designed pneumatic circuit for movement control. 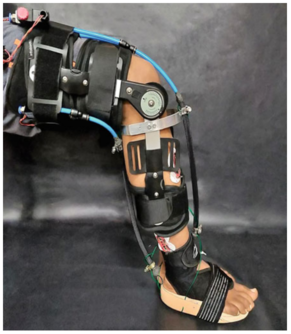
Detection of Varus Thrust in Knee Osteoarthritis
Developed a wearable device with IMU sensors and applied Kalman filters to detect Varus Thrust in older adults’ gait movements, with real-time prediction updates using Pygame, as part of research work in Neuromechanics Laboratory at IIT Madras.
projects
publications
Design and Control of a Low-Cost EMG-Based Soft Robotic Ankle-Foot Orthosis for Foot Drop Rehabilitation.
Published in 4th International and 19th National Conference on Machines and Mechanisms (iNaCoMM 2019), 2019
The paper describes the creation of a soft robotic ankle-foot orthosis that uses an EMG sensor to detect muscle activity and assist in lifting the foot during walking, with a focus on its low-cost design and usability for individuals with foot drop.
Recommended citation: Gudapati N., Kumaran K., Deepak S.V., Mukesh Kanna R., Jinesh R., Poddar H.(2022) Design and Control of a Low-Cost EMG-Based Soft Robotic Ankle-Foot Orthosis for Foot Drop Rehabilitation. In: Kumar R., Chauhan V.S., Talha M., Pathak H. (eds) Machines, Mechanism and Robotics. Lecture Notes in Mechanical Engineering. Springer, Singapore. Pages 1367-1382. https://doi.org/10.1007/978-981-16-0550-5 130 http://jineshrs2398.github.io/files/paper1.pdf
Comparative Study of Different Control Strategies in Permanent Magnet Synchronous Motor Drives
Published in IEEE 5th International Conference on Condition Assessment Techniques in Electrical Systems (CATCON 2021), 2021
The paper investigates and compares the performance of different control strategies, including direct torque control, field-oriented control for permanent magnet synchronous motor (PMSM) drives and analyzes their performance in terms of speed control, torque ripple, and efficiency, with the aim of improving the selection and optimization of control strategies for PMSM drives.
Recommended citation: Vishesh Biyani, Jinesh R, Tharani Eswar T A, Sithartha Sourya V S, Pinkymol K.P (2021), Comparative Study of Different Control Strategies in Permanent Magnet Synchronous Motor Drives, 2021 IEEE 5th International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Pages. 275-281. https://doi.org/10.1109/CATCON52335.2021.9670516 http://jineshrs2398.github.io/files/paper2.pdf
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.